• Sử dụng IC công suất L298N (ST NEW)
• Điện áp tín hiệu 5V/ 0mA-36mA
• Điện áp hoạt động động cơ 5V-35V
• Dòng điều khiển động cơ 2A/1 mạch cầu H
• Nhiệt độ hoạt động -20 tới +135
• Công suất đầu ra 1 cầu H 25W
Module L298 được dùng để chế xe điều khiển, xe dò đường, các thiết bị sử dụng Motor DC hoặc động cơ bước… sử dụng kết hợp với vi điều khiển.
• Có 2 bộ cầu H
• Sử dụng IC công suất L298N (ST NEW)
• Điện áp tín hiệu 5V/ 0mA-36mA
• Điện áp hoạt động động cơ 5V-35V
• Dòng điều khiển động cơ 2A/1 mạch cầu H
• Nhiệt độ hoạt động -20 tới +135
• Công suất đầu ra 1 cầu H 25W
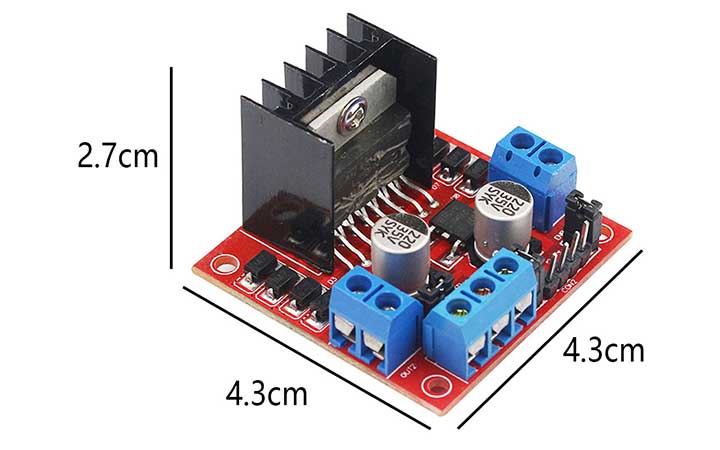
• Trọng lượng 30g
• Kích thước 43*43*27mm
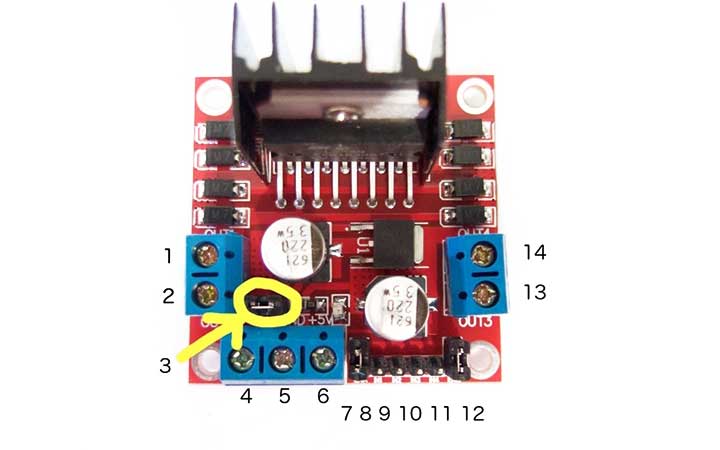
Sơ đồ nối chân MODULE ĐIỀU KHIỂN ĐỘNG CƠ L298
1. DC motor 1 "+" hoặc stepper motor A+
2. DC motor 1 "-" hoặc stepper motor A-
3. 12V jumper - tháo jumper qua nếu sử dụng nguồn trên 12V. Jumper này dùng để cấp nguồn cho IC ổn áp tạo ra nguồn 5V nếu nguồn trên 12V sẽ làm cháy IC Nguồn
4. Cằm dây nguồn cung cấp điện áp cho motor vào đây từ 6V đến 35V.
5. Cắm chân GND của nguồn vào đây
6. Ngõ ra nguồn 5V, nếu jumper đầu vào không rút ra.
7. Chân Enable của Motor 1, chân này dùng để cấp xung PWM cho motor nếu dùng VDK thì rút jumper ra và cắm chân PWM vào đây. Giữ nguyên khi dùng với động cơ bước
8. IN1
9. IN2
10. IN3
11. IN4
12. Chân Enable của Motor 2, chân này dùng để cấp xung PWM cho motor nếu dùng VDK thì rút jumper ra và cắm chân PWM vào đây. Giữ nguyên khi dùng với động cơ bước
13. DC motor 2 "+" hoặc stepper motor B+
14. DC motor 2 "-" hoặc stepper motor B-
Module điều khiển động cơ L298 được tích hợp 2 mạch cầu H, có khả năng điều khiển 2 động cơ DC và 1 động cơ bước. Dòng ra tối đa 2A và nguồn cấp có thể từ 5 đến 35V. Động cơ A được điều khiển bằng cách cấp các mức điện áp 1 và 0 vào 2 chân IN1 IN2 . Tương tự động B được điều khiển bằng cách cấp mức 1, 0 vào IN3 IN4. Đảo các mức 1 , 0 này sẽ làm động cơ đảo chiều và có thể điều khiển tốc độ động cơ bằng cách cấp xung trực tiếp vào các chân IN. Chân Enable còn có tác dụng “phanh” gấp động cơ. Khi đưa chân Enable tương ứng với động cơ xuống mức 0 .
Code điều khiển động cơ DC 3V quay với tốc độ chậm ( băm xung) và cứ 10s đảo chiều 1 lần đồng thời 2 led sáng thay phiên khi động cơ đảo chiều.
Sơ đồ kết nối :
Các bạn có thể đưa các chân Enable lên Vcc bằng Jump nếu không cần sử dụng chức năng phanh gấp, và có thể không cần quan tâm đến 2 chân này nữa

Code giao tiếp :
Code điều khiển động cơ DC 3V quay với tốc độ chậm ( băm xung) và cứ 10s đảo chiều 1 lần đồng thời 2 led sáng thay phiên khi động cơ đảo chiều.
/****************************************************************
Giao tiếp module lm298 với 8051 quay trái phải + băm xung
Thach anh: 12.Mhz
Writed by: Dao Nguyen
Email: namlongschool98@gmail
Date: 12/10/2016
******************************************************************/
//hàm delay 1ms
#include <REGX51.H>
void CTR_delay(unsigned int CTR_t)
{
unsigned int CTR_x,CTR_y;
for(CTR_x=0;CTR_x<t;CTR_x++)
{
for(CTR_y=0;CTR_y<123;CTR_y++);
}
}
//hàm chinh
int CTR_i; // khai báo biến i
void main() //hàm chính
{
P1_0=0;
P1_1=0; // đưa 2 chân P1_0 và P1_1 xuống 0
while(1) // vòn g lặp vô hạn
{
//Động cơ quay trái
for(CTR_i=0;CTR_i<200;CTR_i++) //vòng lăp 200 lần mục đích cho đông cơ quay trong 4s
{
P2=0xFE; //bật led 1
P1_0=1; // đưa chân IN1 lên 1
CTR_delay(1); //trễ 1s
P1_0=0; // đưa chân IN1 xuống 0
CTR_delay(20);
}
P1_0=0; // đưa chân IN1 xuống 0
//Động cơ quay phải
for(CTR_i=0;CTR_i<200;CTR_i++)
{
P2=0xFD; // bật led 2 tắt led 1
P1_1=1; // đưa chân IN 2 lên 1
CTR_delay(1); //trễ 1s
P1_1=0; //đưa IN 2 xuống 0
CTR_delay(20); //trễ 1s
}
}
}

Chế độ bảo hành
Chế độ bảo hành sản phẩm của Linh Kiện Điện Tử 3M
Bảo đảm chất lượng
Sản phẩm được Test, dán Tem trước khi được đóng gói Kĩ Càng gửi cho Quý Khách
Cước vận chuyển
Cước vận chuyển được tự động đồng bộ đơn vị vận chuyển, Sản phẩm phát ngay trong ngày. Hỗ trợ đơn hàng: 0865.853.416
Hỗ trợ kỹ thuật
Tư vấn kĩ thuật: 0865.853.416 Khi khách hàng gặp khó khăn trong quá trình sử dụng










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}